

Équipe DEXTER
Design and control of robotic manipulators
L’équipe DEXTER se donne pour objectifs de concevoir, réaliser et commander des robots performants capables de gestes fins, rapides et/ou précis. Pour atteindre ces objectifs, les activités de recherche fondamentales sont systématiquement couplées à des validations expérimentales réalistes facilitant leur valorisation auprès de l’industrie ou du secteur médical. Les thèmes scientifiques de l’équipe incluent des méthodologies de conception mécanique, la proposition d’indices de performance originaux, le développement de protocoles d’estimation et la synthèse de commandes référencées capteur (effort/vision) et/ou modèle (prédictive, adaptative).
Privilégiant l’innovation au sein d’une démarche essentiellement mécatronique, les contributions majeures de l’équipe portent sur deux grands domaines :
- Robotique médicale allant de l’assistance à la personne à l’assistance au chirurgien, lien vers le site de la plateforme robChir : https://www.lirmm.fr/robmed-plateforme/index.html
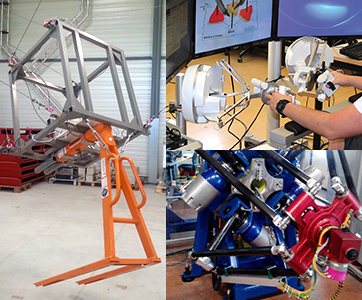
- Robotique parallèle pour des applications industrielles exigeantes en termes de vitesses, précision, dimensions de l’espace de travail et/ou masses des charges transportées
Permanents
Nabil Zemiti, Professeur des universités, UM
François Pierrot, Directeur de recherche, CNRS
Ahmed Chemori, Chargé de recherche, CNRS
Marc Gouttefarde, Directeur de recherche, CNRS
Sébastien Krut, Chargé de recherche, CNRS
Olivier Company, Maître de conférences, UM
Yassine Haddab, Professeur des universités, UM
Salih Abdelaziz, Maître de conférences, UM
Philippe Poignet, Professeur des universités, UM
Cedric Girerd, Chargé de recherche, CNRS
Chao Liu, Chargé de recherche, CNRS
Lucas Lavenir, Ingénieur de recherche, CNRS
Doctorants
Arthur Lacroix, UM
Juliana Castelo Branco Dreyer, CNRS
Felipe Marques Farias Filho, SYMETRIE
Alexandre Thuillier, CNRS
Pierre-Emmanuel Chammas, CHU Mtp
Romaric Bouquinet, CNAM Paris
Camille Benoist, CARANX MEDICAL
Chenji Li, UM
Raissa Benazouz, UM
Cyril Barrelet, UM
Zeinab Awada, UM
Lénaïc Cuau, UM
Kenza Khedache, UM
Clement Robert, SYMETRIE
Autres personnels
Nicolas Testard, CDD Chercheur, CNRS
Jimmy Lopez, CDD Ingénieur-Technicien, UM
Anne Lise Piganiol, CDD Ingénieur-Technicien, AxLR
Jeremy Sand, Doctorant externe, U Strasbourg
Teddy Baylet, CDD Ingénieur-Technicien, UM
Hamza El Jjouaoui, CDD Ingénieur-Technicien, AxLR
Suranjana Bose, CDD Ingénieur-Technicien, CNRS
Les travaux de recherche de l’équipe DEXTER concernent deux thématiques :
- Robotique médicale
- Robotique parallèle
- M. Bennehar, A.Chemori, M. Bouri, L.F. Jenni and F. Pierrot, « A New RISE-based Adaptive Control of PKMs: Design, Stability Analysis and Experiments », International Journal of Control, 2017.
- Q. Boehler, S. Abdelaziz, M. Vedrines, P. Poignet, P. Renaud, « From Modeling to Control of a Variable Stiffness Device Based on a Cable-driven Tensegrity Mechanism », Mechanism and Machine Theory, vol 107, 2017.
- L. Gagliardini, S. Caro, M. Gouttefarde, A. Girin, « Discrete reconfiguration planning for Cable-Driven Parallel Robots, » Mechanism and Machine Theory, Vol. 100, pp. 313-337, 2016.
- F. Despinoy, D. Bouget, G. Forestier, C. Pinet, N. Zemiti, P. Poignet, and P. Jannin, « Unsupervised Trajectory Segmentation for Surgical Gesture Recognition in Robotic Training », IEEE Transactions on Biomedical Engineering, Vol 63, No. 6, pp 1280-1291, 2016.
- M. Gouttefarde, J. Lamaury, C. Reichert, T. Bruckmann, « A Versatile Tension Distribution Algorithm for n-DOF Parallel Robots Driven by n+2 Cables, » IEEE Transactions on Robotics, Vol. 31, No. 6, pp. 1444-1457, 2015.
- G. Sartori-Natal, A.Chemori and F. Pierrot, « Dual-Space Control of Extremely Fast Parallel Manipulators: Payload Changes and the 100G Experiment », IEEE Transactions on Control Systems Technology, Vol 23, Issue 4, pp. 1520–1535, 2015.
Titre : Développement des ostéotomies robot-assistées sur
lambeau libre de fibula en reconstruction mandibulaire :
de la planification aux ostéotomies guidées.
Doctorant : Marie De Boutray
Date de soutenance : 2024-12-12
Directeur de thèse :
Philippe Poignet
Titre : Commande robuste/adaptative pour lamélioration des performances des robots à structure parallèle de haute précision
Doctorant : Youcef Mohamed Fitas
Date de soutenance : 2024-11-29
Directeur de thèse :
François Pierrot
Titre : Contributions à la modélisation et la commande de véhicules sous-marins autonomes actionnés par des nageoires
Doctorant : Mohamed Walid Remmas
Date de soutenance : 2023-12-18
Directeurs de thèse :
François Pierrot,
Kruusmaa Maarja
Titre : Intégration de fonctions pour lendoscopie par conception de mécanismes multistables produits par fabrication additive
Doctorant : Benjamin Calme
Date de soutenance : 2023-03-17
Directeur de thèse :
Yassine Haddab
Titre : Commande dun Robot Parallel pour des Tâches de Pick-and-Throw à Haute Cadence en Tri Sélectif
Doctorant : Ghina Hassan
Date de soutenance : 2022-12-12
Directeur de thèse :
Marc Gouttefarde
Titre : Contribution à la Commande Robuste Non Linéaire pour le Suivi de Trajectoire des Robots Sous-Marins de Petite Taille: Du Concept aux Expérimentations Temps Réel
Doctorant : Auwal Tijjani Shehu
Date de soutenance : 2021-12-16
Directeur de thèse :
Vincent Creuze
Titre : Aide au geste chirurgical pour la pose de neuroprothèses auditives par fusion dimages US/CT
Doctorant : Lucas Lavenir
Date de soutenance : 2021-12-15
Directeur de thèse :
Philippe Poignet
Titre : Conception et commande de mécanismes de tenségrité pour des applications en radiologie interventionnelle
Doctorant : Jr Martin Jurado Realpe
Date de soutenance : 2021-06-29
Directeur de thèse :
Philippe Poignet
Titre : Urétéroscopie flexible téléopérée pour le traitement des pathologies du haut appareil urinaire avec compensation des mouvements physiologiques
Doctorant : David Cavard
Date de soutenance : 2020-12-17
Directeur de thèse :
Philippe Poignet
Titre : Commande Prédictive des Robots Parallèles à Câbles : du Concept à la Validation Temps-Réel
Doctorant : Joao Cavalcanti Santos
Date de soutenance : 2020-10-05
Directeur de thèse :
Marc Gouttefarde
Titre : Optimisation orientée application de l’étalonnage élastostatique de robots: Implémentation pour des hexapodes de positionnement précis
Doctorant : Vinayak Kalas
Date de soutenance : 2020-09-18
Directeur de thèse :
François Pierrot
Titre : Développement d’une capsule de prélèvement de microbiote intestinal utilisant un mécanisme bistable et exploitant la fabrication additive.
Doctorant : Mouna Ben Salem
Date de soutenance : 2020-06-19
Directeur de thèse :
Yassine Haddab
Titre : Sur la commande des robots parallèles pour des performances dynamiques à haute cadence: De la conception à la validation expérimentale
Doctorant : Hussein Saied
Date de soutenance : 2019-11-29
Directeurs de thèse :
Clovis Francis,
François Pierrot
Titre : Optimisation de la propulsion d’un véhicule sous-marin à propulseurs orientables
Doctorant : Maxence Blond
Date de soutenance : 2019-05-21
Directeur de thèse :
Daniel Simon
Titre : Conception, optimisation et commande d’un stablisateur actif pour la compensation des vibrations des robots parallèles à câbles
Doctorant : Maximilien Lesellier
Date de soutenance : 2019-02-27
Directeur de thèse :
Marc Gouttefarde
Titre : Dynamique linéarisée totale : Application aux robots parallèles
Doctorant : Julien Prades
Date de soutenance : 2018-11-27
Directeur de thèse :
François Pierrot
Titre : Contributions à la commande de bras manipulateurs de robot sous-marin pour la manipulation à grande profondeur d’échantillons biologiques déformables
Doctorant : François Leborne
Date de soutenance : 2018-11-16
Directeur de thèse :
Vincent Creuze
Titre : Modélisation, étude et commande d’un robot sous-marin à câbles
Doctorant : Gamal Elghazaly
Date de soutenance : 2017-06-12
Directeur de thèse :
François Pierrot
Titre : Développement d’un système robotique pour des essais au sol du système de contrôle d’attitude et d’orbite d’un CubeSat
Doctorant : Irina Gavrilovich
Date de soutenance : 2016-12-14
Directeur de thèse :
François Pierrot
Titre : Optimisation de la Conception et Commande de Robot à Tubes Concentriques pour la Chirurgie Laparoscopique par Accès Unique
Doctorant : Mohamed Nassim Boushaki
Date de soutenance : 2016-10-06
Directeurs de thèse :
Chao Liu,
Philippe Poignet
Titre : Teleoperation sans fil refletant la force pour la chirurgie robot-assistee
Doctorant : Jing Guo
Date de soutenance : 2016-03-31
Directeurs de thèse :
Chao Liu,
Philippe Poignet
Démonstrateur du projet ANR DexterWide : robot parallèle à câbles CoGiRo équipé d’un stabilisateur pour la compensation active de vibrations.
Démonstrateur du projet ANR DexterWide : robot parallèle à câbles CoGiRo équipé d’un robot SIA20 perçant dans le béton