Jean Triboulet
Jean Tribo ulet
ulet
Associate Professor (HDR)
Robotics Department
![]() LIRMM
LIRMM
Montpellier Laboratory of Informatics, Robotics, and Microelectronics
860 rue de St Priest – Bât 5- 34392 Montpellier Cedex 5 France
jean.triboulet@lirmm.fr
33(0)4 67 41 85 60
The main theme of my research activities is vision for robotics, working on teleoperated robotics projects, mobile robotics, medical robotics, and finally underwater robotics, as an associate professor.
KARST project :
![]()
Aims at conceiving, designing and engineering an intelligent and practical robotic system to explore/inspect underwater confined environment.
As generic case studies, the project focuses on karst exploration and hydraulic galleries inspections. The difficulty of karstic environment lies in the subaquatic condition, the confinement and its chaotic morphology. On the other hand, this omnipresent and contrasted environment offers lot information for autonomous navigation. We are working on a stereovision system able to reconstruct in 3D the cave environment useful for the robot.
Underwater robotics:
![]() Exchanges with fellow historians who have worked on excavations in the Rhone.
Exchanges with fellow historians who have worked on excavations in the Rhone.
The idea of a multimodal fusion between sonographic topographic survey and 3D survey of an area of interest in sonar mapping by means of an immersive stereoscopic sensor and 3D reconstruction methods that are robust to the constraints imposed by this medium.
Medical Robotics:
 Robotic assisted heart surgery is the main topic of this work.
Robotic assisted heart surgery is the main topic of this work.
First by working on methods using natural landmarks (textures) in rapid stereoscopic vision to reconstruct the 3D position of the cardiac surface in order to guide a robotic system assisting the surgeon in his surgical procedure.
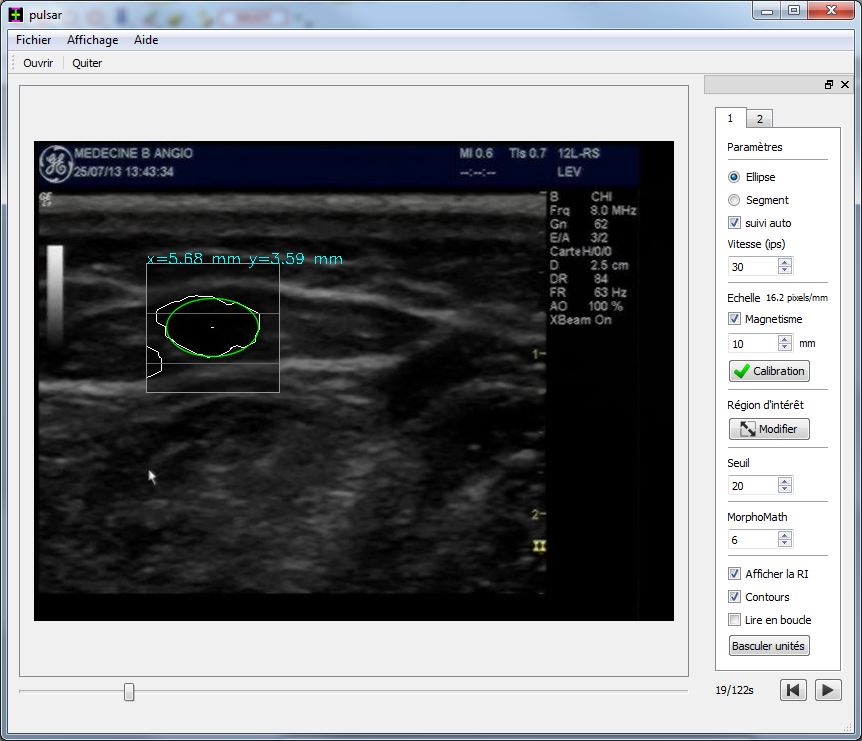
This same problem of assistance to the surgical gesture is found in the analysis of ultrasound images where the vision must follow the movement of a mitral valve and jointly guide the movement of an instrument visible in the same image.
Mobile Robotics:
On a mobile base equipped with low level cameras mounted vertically, vision work led to the robust calibration of rough sensors, and then on the mapping of reliable visual targets (segments) by methods different than those based on the epipolar constraint.
Characterization of sensors:
Always in this context of medical robotics, the instrumentation of an ultrasound probe with a force sensor, allows coupling a vision / force measurement to refine the diagnosis and the pathological follow-up in the context of cardiovascular diseases.